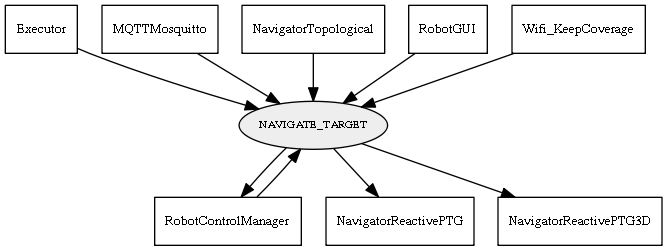
| Variable name | Short description | Who publishes it? | Who subscribes to it? |
| NAVIGATE_TARGET | Set destination ([x y]) for robot to go autonomously | Executor MQTTMosquitto NavigatorTopological RobotControlManager RobotGUI Wifi_KeepCoverage | NavigatorReactivePTG NavigatorReactivePTG3D RobotControlManager |