| Module name | Short description | Publishes | Subscribes |
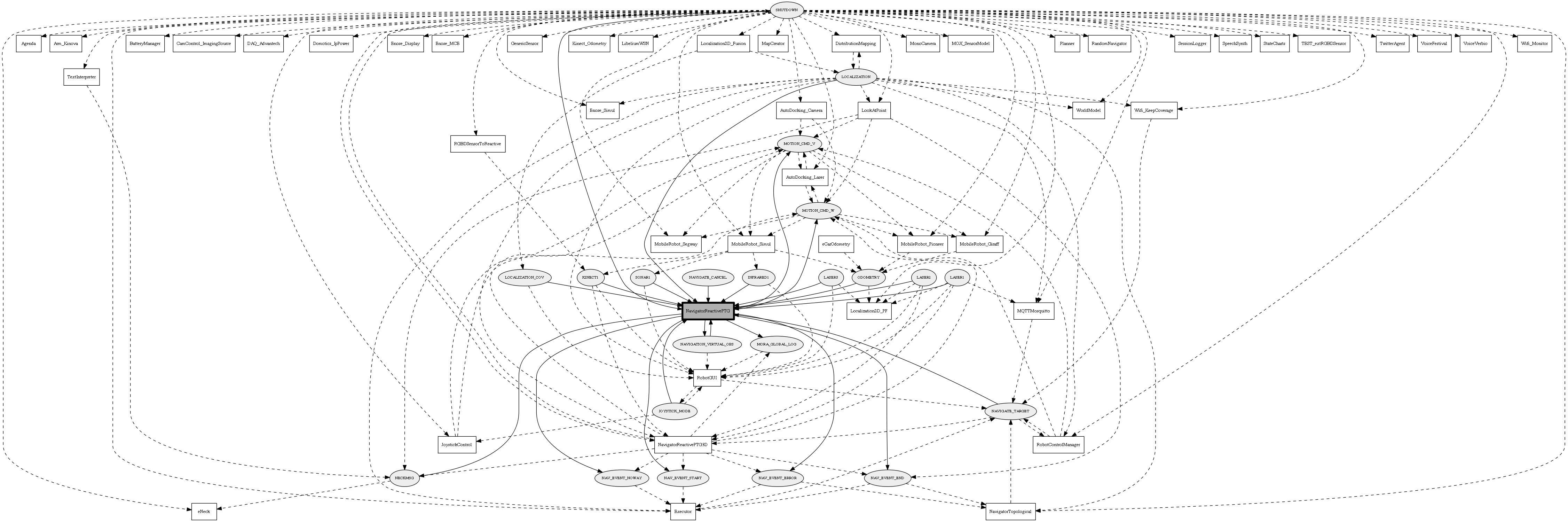
| NavigatorReactivePTG | A generic reactive navigator. | MORA_GLOBAL_LOG , MOTION_CMD_V , MOTION_CMD_W , NAV_EVENT_END , NAV_EVENT_ERROR , NAV_EVENT_NOWAY , NAV_EVENT_START , NAVIGATION_VIRTUAL_OBS , NECKMSG | INFRARED1 , JOYSTICK_MODE , KINECT1 , LASER1 , LASER2 , LASER3 , LOCALIZATION , LOCALIZATION_COV , NAVIGATE_CANCEL , NAVIGATE_TARGET , NAVIGATION_VIRTUAL_OBS , ODOMETRY , SHUTDOWN , SONAR1 |
| Parameter | Description |
save_log |
Save reactive log (default:false) |
virtual_obstacles |
An optional list fixed obstacle points in global coordinates, as a 2xM or 3xM matrix with the X, Y and Z coordinates of the obstacles: "[x1 x2 x3 ...;y1 y2 y3 ...;z1 z2 z3...]"Virtual obstacles can be also changed in runtime using the MOOS variable NAVIGATION_VIRTUAL_OBS. In fact, this module will also publish in NAVIGATION_VIRTUAL_OBS the obstacles read from the mission file, if any. |
virtual_obstacles_file |
An optional file with a list of fixed obstacle points in global coordinates, as a 2xM or 3xM matrix with the X, Y and Z coordinates of the obstacles: "[x1 x2 x3 ...;y1 y2 y3 ...;z1 z2 z3...]"Virtual obstacles can be also changed in runtime using the MOOS variable NAVIGATION_VIRTUAL_OBS. In fact, this module will also publish in NAVIGATION_VIRTUAL_OBS the obstacles read from the given file, if any. |
Blanco, J.L. and Gonzalez, J. and Fernandez-Madrigal, J.A., Extending obstacle avoidance methods through multiple parameter-space transformations,Autonomous Robots, vol. 24, pp. 29-48, 2008.