| Module name | Short description | Publishes | Subscribes |
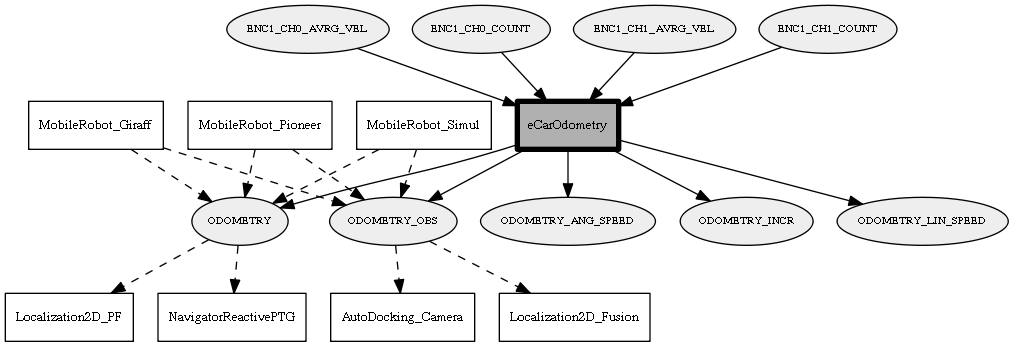
| eCarOdometry | Differential-drive odometry estimation from a pair of encoders in the rear wheels. | ODOMETRY , ODOMETRY_ANG_SPEED , ODOMETRY_INCR , ODOMETRY_LIN_SPEED , ODOMETRY_OBS | ENC1_CH0_AVRG_VEL , ENC1_CH0_COUNT , ENC1_CH1_AVRG_VEL , ENC1_CH1_COUNT |
| Parameter | Description |
left_K |
Ticks to meters constant for left wheel encoders. |
odometry_verbose |
Set to "true" to display live odometry to console. |
right_K |
Ticks to meters constant for right wheel encoders. |
wheels_dist |
Wheel-to-wheel distance (meters) |